
תכנות בקר ארדואינו
Arduino
דוחף זרם למנוע - Motor Driver
מנועים חשמליים הם צרכנים מאוד גדולים של זרם/מתח. שימושים שונים במנוע חשמלי דורשים תפקוד מסויים מהמנוע - מהירות גבוהה או נמוכה, כח/מומנט גבוה או נמוך, מימדים וכו. כל מנוע מתוכנן למשימה מסויימת, למשל: גלגלת של מנוף מסתובבת לשני כיוונים במהירות קבועה, מאוורר מסתובב לכיוון אחד אך במהירות משתנה, מנוע של רכב רובוטי מסתובב לשני הכיוונים ובמהירות משתנה, ועוד. כדי לאפשר למערכת הבקרה להפעיל את המנוע החשמלי בצורה מיטבית למשימה יש לשלב במערכת רכיב שנקרא דוחף זרם או Motor Driver.

למה צריך דוחף זרם ואי אפשר להסתפק בבקר ארדואינו?
-
חיבור מנוע DC לפינים של בקר ארדואינו יכול לקבל מהבקר עד 40 mA של זרם. זרם זה בדרך כלל מספיק לרוב רכיבי הבקרה והחיישנים אך אינו מספיק למרבים המנועים שצריכים זרם גבוה יותר להתחיל לנוע וגם כדי לספק את מומנט הכוח שלהם.
-
אם נחבר צרכן של זרם גבוה לבקר ארדואינו נשבש את יתר פעולות הבקרה שמתבצעות מכוון שהצרכן ינסה למשוך את כמות הזרם שהוא צריך וזה יבוא על חשבון הרכיבים האחרים שמחוברים לארדואינו. במצב כזה החיישנים לא יתפקדו באמינות ויכולים לגרום לבקר ארדואינו לקבל החלטות שגויות שיגרמו נזק למערכת ולסביבה
-
חיבור צרכן שמנסה למשוך זרם גבוה מהפינים של הבקר יכול לגרום לשריפת רכיבי הבקר או את כולו מכוון שהחיווט והרכיבים המורכבים על בקר ארדואינו מתוכננים לשאת בזרם נמוך.
לאור הסיבות הללו יש צורך ברכיב נוסף שמסוגל להזרים דרכו זרם גבוה המגיע ממקור מתח חיצוני. כמו כן הרכיב מקבל את הפיקוד מבקר ארדואינו ומאפשר שליטה בכיוון הסיבוב ובמהירות הסיבוב.רכיב זה נקרא דוחף זרם.
חשוב: בפרוייקטים בהם המנוע מסתובב בכיוון אחד במהירות קבועה ניתן לשלוט במנוע על ידי שימוש ברכיבי מיתוג אלקטרונים (טרנזיסטורים) ובלי דוחף זרם.
איך מבקרים את כיוון סיבוב המנוע?
לכל מנוע יש שני חיבורים: פלוס ומינוס. אם נחבר את המנוע למקור מתח חיצוני הוא יסתובב בכיוון מסויים. אם נחליף את החיבורים כך שמה שהיה מחובר למינוס יתחבר לפלוס ולהיפך, המנוע יסתובב בכיוון הפוך. זהו העקרון הבסיסי לשליטה בכיוון הסיבוב. כמובן שזה לא הגיוני לתכנן מערכת שמחליפים חיבורים בזמן פעולה כדי לשנות כיוון סיבוב, וכאן נכנסת צורת חיבור המיושמת בתוך דוחף הזרם שנקראת גשר-H או H-bridge.
בתמונה לפניכם מופיע מעגל שבמרכזו מנוע DC ושני קטביו מחוברים למפסקים ובסוף למקור מתח.

כדי לסובב את המנוע בכיוון השעון, נסגור את המפסק השמאלי העליון ואת הימני התחתון. באופן זה הזרם שמגיע ממקור המתח למעלה, יזרום דרך המפסק הסגור העליון, אל המנוע, ודרך המפסק הסגור התחתון את GND - ראו בתמונה הבאה.

כדי לסובב את המנוע נגד כיוון השעון, נסגור את המפסק הימני העליון ואת השמאלי התחתון. באופן זה הזרם שמגיע ממקור המתח למעלה, יזרום דרך המפסק הסגור העליון, אל המנוע, ודרך המפסק הסגור התחתון את GND - ראו בתמונה הבאה.

כפי שראינו צורת הפעלה כזו מאפשר שליטה על כיוון הסיבוב של המנוע. כמובן שבפועל לא פותחים וסוגרים מפסקים פיזיים, אלא ישנם רכיבי מיתוג אלקטרוני שמקבלים פיקוד מהארדואינו להפתח ולהסגר. צורת חיבור זו נקראת H-Bridge בגלל צורת האות H והעובדה שהמנוע מחובר על הגשר באמצע.

דוחף זרם L293D
לאחר שבחרנו את המנוע המתאים למשימה שלנו עלינו להתאים לו גם דוחף זרם. יש כל מיני סוגים של דוחפי זרם והם בעיקר נבדלים ב: סוג המנוע אותו הם יודעים לבקר, הזרם המקסימלי אותו הם מסוגלים להעביר, כמות המנועים שניתן לחבר.
דוחף הזרם הבסיסי איתו מתחילים נקרא L293D מתוצרת חברת Texas Instruments. ניתן ללחוץ על הקישור הבא כדי לראות את דף נתוני היצרן של הרכיב.
לרכיב יש 16 רגלים והוא מאפשר לבקר שני מנועי DC או מנוע צעד אחד. המתח המקסימלי למנוע שהוא מבקר עומד על 36V והזרם המקסימלי עומד על 600mA.

חיבור דוחף זרם L293D לבקר ארדואינו
בתמונה לפניכם מופיעה צורת חיבור של שני מנועי DC לדוחף הזרם. החיבורים ממוספרים מ-1 עד 16. אם נחזיק את הרכיב מולנו כאשר המגרעת העגולה נמצאת בחלק העליון, המיספור מתחיל משמאל למגרעת למעלה וממשיך נגד כיוון השעון.

חיבורים מספר 1 ו-9 נקראים Enable מאחר והם מאפשרים העברת מתח/זרם להפעלת המנוע. אם נחבר אותם ל-GND המנוע יעבוד ללא תנועה. אם נחבר אותם ל-5 וולט המנוע יסתובב במהירות מקסימלית. אם נחבר אותם לפין דיגיטלי PWM וניתן ערך ביניים המנוע יסתובב במהירות מתאימה באופן יחסי למתח אותו נתנו.
חיבורים 3 ו-6 מיועדים לחיבור שני החוטים המגיעים מהמנוע M1. באופן דומה חיבורים 11 ו-14 מאפשרים לחבר מנוע DC שני M2.
חיבורים 4,5,12,13 מתחברים ל-GND. חיביים לחבר את כולם ל-GND. בדוחפי זרם אחרים דאגו לחבר את כולם באופן מובנה.
חיבורים 2 ו-7 מיועדים לקבלת פיקוד מהארדואינו משני פינים דיגיטלים על הבקר לשליטה במנוע M1. באופן דומה חיבורים 10 ו-15 מקבלים פיקוד מהארדואינו לשליטה על מנוע M2.
חיבור מספר 16 מקבל 5 וולט קבוע והוא מספק את המתח הנדרש לפעולת דוחף הזרם.
חיבור מספר 8 מתחבר לפלוס של מקור המתח החיצוני שיפעיל את המנוע. ניתן לחבר עד 36 וולט. המינוס של מקור המתח חייב להיות מחובר ל-GND של הארדואינו.
בתמונה לפניכם צורת חיבור של מנוע אחד.

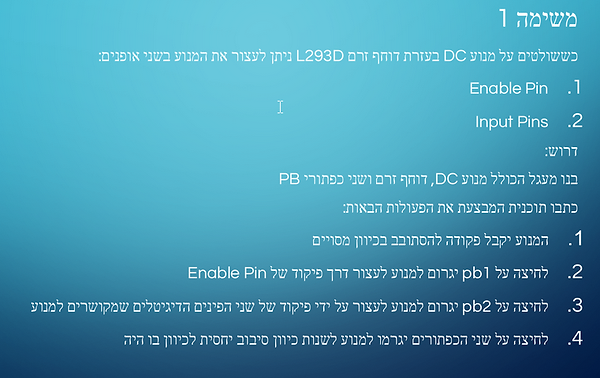
תכנות הבקר להפעלה של מנוע DC בעזרת דוחף זרם L293D
כפי שראינו בהסבר על חיבור מנוע לדוחף זרם, יש לנו שני חיבורים לפינים דיגיטלים לשליטה בכיוון וחיבור אחד PWM לשליטה במהירות.
נסביר תחילה איך שולטים בכיוון הסיבוב. כדי לסובב את המנוע בכיוון מסויים יש לקבל מזוג הפינים הדיגיטלים שני ערכים שונים: אחד HIGH והשני LOW או להיפך. בטבלה הבאה רואים את השילובים האפשריים כאשר המנוע מחובר לדוגמא לפינים 7 ו-8:
1-HIGH
0 - LOW

בטבלה גם רואים בשורה האחרונה איך עוצרים את המנוע. זו אפשרות נוספת מעבר לאופציה של שליחת LOW לפין ENABLE שהוזכר קודם.

כדי לשלוט במהירות מחבר את רגל מספר 1 - ENABLE - לפין 9 שהוא PWM וניתן ערכים שונים בעזרת analogWrite. התוכנית הבאה מגבירה ומנמיכה את המהירות של המנוע.

דוחף זרם L298N
דוחף זרם ותיק שמאפשר לנו לחבר אליו ולהפעיל מנועים זוללי אנרגיה מעבר למגבלות של L293D. ניתן ללחוץ על הקישור הבא כדי לראות את דף נתוני היצרן של הרכיב.
הרכיב מגיע בד"כ מוכלל על לוח מודפס עם צלעות קירור לפינוי חום ועם חיבורי טרמינלים לקלות חיווט. הוא מאפשר לבקר שני מנועי DC או מנוע צעד אחד. המתח המקסימלי למנוע שהוא מבקר עומד על 46V והזרם המקסימלי עומד על 1A לערוץ (למנוע).
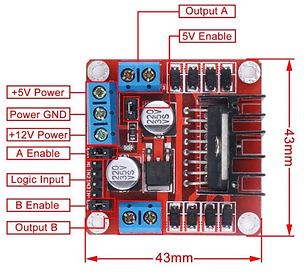
חיבור דוחף זרם L298N לבקר ארדואינו
בתמונה מעל ניתן לראות את החיבורים המצויינים ע"י OUTPUT A ו- OUTPUT B. בכל אחד יש שני חיבורים אל החוטים המגיעים מהמנועים. החיבורים מסומנים out 1 out 2 על חיבור OUTPUT A, ו- out 3 out 4 על OUTPUT B.
על הלוח נמצא גם טרמינל 3 חיבורים למקור מתח חיצוני. פין מרכזי מתחבר ל GND על הבקר ולמינוס של מקור המתח החיצוני. פין אחד מסומן ב-12V כניסת מתח, והפין השלישי מסומן 5V power מאפשר הזנת מתח מיושר של 5V לבקר.
כדי לשלוט בכיוון הנסיעה נחבר את הפינים המסומנים Logic Input לפינים דיגיטלים בבקר. ישנם 4 פינים כאלה, השניים העליונים ישלטו על כיוון הסיבוב של OUTPUT A, ואילו השניים התחתונים ישלטו בכיוון הסיבוב של OUTPUT B.
הפינים המסומנים Enable A & B מאפשרים לשלוט במהירות הסיבוב של המנוע ע"י שימוש באות PWM. יש לחבר אותם לפינים דיגיטלים PWM בבקר ולשלוח סיגנל מתאים כדי להשפיע על המהירות.
בתמונה לפניכם מופיעה צורת חיבור של שני מנועי DC לדוחף הזרם ולמקור מתח חיצוני. החיבור לא כולל שליטה במהירות מכיוון שמופיעים שם שני ג'אמפרים צהובים על הפינים שאמורים להתחבר ל PWM. ג'אמפרים אלה גורמים לשליחת 5V קבוע מה שמתפרש כנסיעה במהירות מקסימלית.

תכנות הבקר להפעלה של מנוע DC בעזרת דוחף זרם L298N
כפי שראינו בהסבר על חיבור מנוע לדוחף זרם, יש לנו שני חיבורים לפינים דיגיטלים לשליטה בכיוון וחיבור אחד PWM לשליטה במהירות.
השליטה בכיוון הסיבוב עם דוחף זרם זה זהה לאופן בו עבדנו עם הפינים הדיגיטלים וה-PWM עבור דוחף זרם L293D. באופן לא מפתיע גם התכנות יהיה זהה, כלומר ניתן לקחת את הדוגמא מההסבר של דוחף זרם L293D ולהשתמש בה כאן. כמובן יש לדאוד לחבר את היציאות לפינים הדיגיטלים המתאימים.
סרטון הסבר מצויין (בשפה האנגלית על עבודה עם דוחף זרם L298N:
לפניכם מספר תרגילי דוגמא ופתרונות לעבודה עם L293D או L298N.
תרגול שליטה במנוע DC

בסרטון הבא יש הסבר על שימוש בדוחף זרם של חברת adafruit המכיל שני דוחפי זרם L293D ולפיכך יכול לבקר על עד 4 מנועי DC, או 2 מנועי צעד או שני מנועי סרוו